

你以為買到便宜的掃地機很賺,但它可能只是在盲人摸象

大家都很忙,所以越來越多人傾向於使用掃地機器人來幫助維持每天家裡的清潔,但在選購掃地機器人時常常會讓人很無助,因為幾乎沒有任何有效的資訊可以輔助自己選購,像除濕機還有個除溼力可以看,清淨機多數時間下也有CADR可以參考,掃地機就真的難了,今天小二就用最淺顯的方式讓客倌對最影響掃地機器人實際表現的核心:規劃,有一個簡單的概念。
規劃是啥?可以吃嗎?
所謂規劃是一個概念,是相對於早期”隨機”掃地機器人的稱呼,在追求的是有效率的行走至空間內所有可以走到的地方,藉以完成盡量高的覆蓋,而掃地機器人之所以需要規劃是因為
- 家裡的環境是複雜的
- 掃地機器人的電量是有限的
相信多數人不會住在一個四四方方1坪大,地上什麼東西也沒有的地方,家裡都會有格局區分不同生活區域,地上也都會有家具落地妨礙掃地機器人的行走,掃地機器人從充電座出發後,如果是漫無目的的瞎晃,每一寸地板都只靠機率決定是否會被掃到,自然房間、桌腳這類進去比較麻煩的地方被掃到的機率更低(找不到路進去),或是進去掃了之後能夠出來的機率較低。
此外機器人的電量是有限的,一般來說頂多60-90分鐘就差不多到極限了,所以過往三房兩廳的標準家庭,如果使用早期的隨機式掃地機器人很常碰到的一個困擾就是機器人放出來之後,就在客廳裡晃過來晃過去最後晃到沒電回充,但房間卻從來沒有進去過。而所謂的規劃之所以重要就是它在追求:
如何在有限時間內盡可能讓所有地方被掃到至少一次
隨機式唯一可能比規劃式更好的情境:10坪或更小的套房
雖然隨機式掃到哪邊基本看臉,但反過來說,只要室內空間不大,只要讓它掃上足夠久的時間,還是滿有可能把大多數的地方都走到,而且每一個地方還會掃到不只一次,這比起規劃式的通過一次就不回頭的俐落,在較小較單純的環境下,隨機式反而有可能是掃得更乾淨的。
例如像這樣的一間房間,隨機式理論上讓它掃到飽已經足以覆蓋大多數的區域,甚至每個地方掃了不只一次,有可能比起一台規劃式的機種掃的更加乾淨,但如果想要連門外的空間也一起掃乾淨就難了,因為那道門很容易扮演天塹的腳色,不是出不去就是出去後回不來

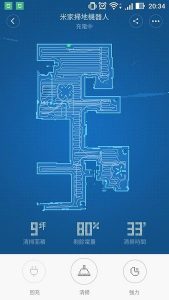
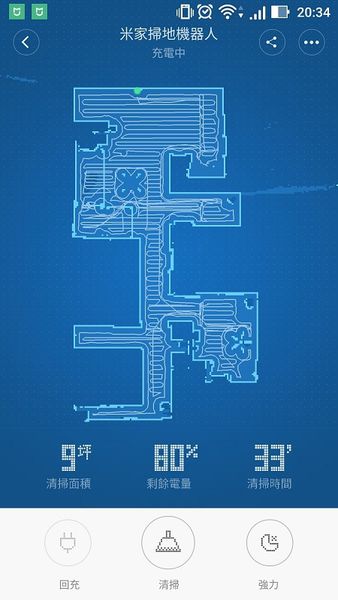
以前隨機式的掃地機器人還可以大聲的說自己便宜,但隨著米家掃地機器人的霸氣登場,萬元以內的掃地機器人瞬間沒得混,而其所屬的”規劃式”陣營,也開始成為消費者對於掃地機的一項強烈需求,畢竟當你看到一台1萬不到的掃地機器人可以這樣子走,把掃地變成非常聰明、效率的時候,真的會很難說服自己去買舊式的隨機式掃地機器人。
而繼掃拖合一這個概念被玩得差不多之後,目前市面上掃地機器人一大堆的產品都會加註包含且不限於這四大主流銷售詞:
路徑規劃、精準定位、智能導航、弓形行走
你現在只要隨便去任何一家購物網站上搜尋掃地機器人,看一下產品資訊多半都可以看到下面這些文案。
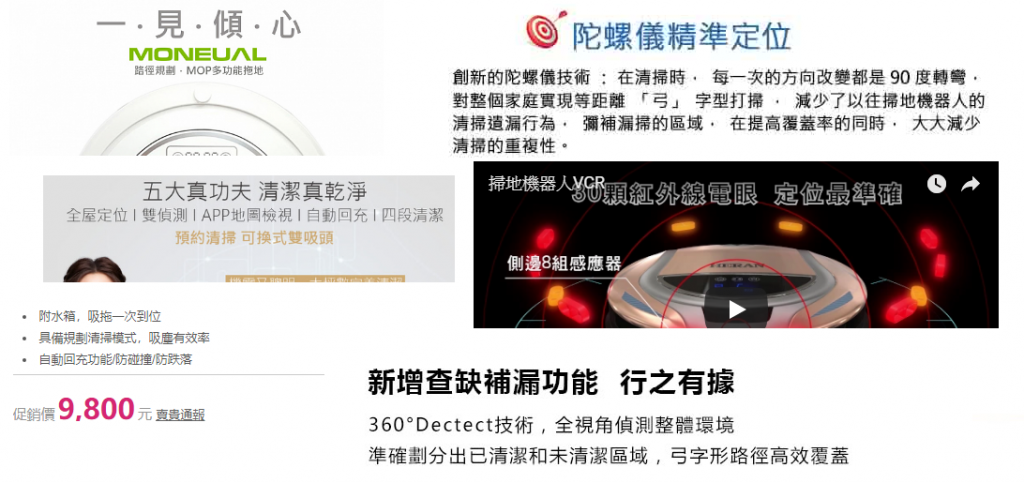
小二先說,確實這些機器人都具備規劃能力,但你很難確定他們各自的規劃能力到哪個水準,放在你家裡到底走的好不好,就好像同樣是打排球,小二就是個菜雞,資深甲組跟我就是完全不同等級的生物,你在外面打場會想找誰當隊友呢?而要怎麼判斷這台掃地機器人是好隊友還是豬隊友其實也不難,我們只要注意這些地方就好:
做好規劃的第一步:張開眼睛
掃地機器人雖然長得一點都不像人,但還是可以用人來類比一下。如果您今天要把家裡每一寸地板都走過,你要做的第一件事會是什麼?
睜開眼睛,看清楚自己在哪
這句聽起來很像廢話沒錯,但其實對於掃地機器人來說,光是要求它要睜開眼睛就可以刷掉一狗票不合格的了,所謂睜開眼睛目前主要有兩類睜法
- 往前看
- 往上看
往前看的代表就是像米家、Neato、Vorwerk等的雷射定位,像是米家一啟動,雷射頭就開始拼命旋轉,藉由接受射出->反彈的雷射得出水平面上的障礙物、壁面等資訊,地圖就慢慢建立起來了

往上看則像是iRobot、Dyson、LG等、透過影像隨著機器移動的變化去辨識障礙與可前往的地方,

睜開眼睛因為可以看見並使用了環境中的各種參照物,所以畫出來的地圖相對可靠,機器也可以透過環境資訊校正自己的位置,因此可以行走的更加合理
紅外線/超音波=伸手摸索;陀螺儀=平衡感;里程計=計步器
很多掃地機器人基於成本或是技術門檻等限制,沒辦法讓掃地機器人睜開眼睛,所以他們的做法就是退而求其次,像是這三個就是最常被拿出來說自己很會規劃好棒棒的材料,但其實對於那些會睜開眼睛的機器人來說,這些都只是最基本的配備,也有,只是基本到不用拿出來講而已:
- 紅外線、超音波:偵測機器是否馬上要碰到障礙物,就好比是你閉著眼睛往前走,但手一直往前方180度摸索,當手摸到東西的時候就知道要小心別撞到了。
- 陀螺儀:輔助機器確認自己是不是有走偏,畢竟只要偏移了1度,誤差就會隨著移動距離而不停增加,所以相當於幫掃地機器人添加一個絕佳的平衡感,讓它可以筆直的前進
- 里程計:用來估算掃地機器人到底走了多少距離,譬如單邊長度最多走3m就要迴轉,往回再走3m等
你覺得一個人可以閉著眼睛,靠著平衡感以及伸手摸索就可以順利的踏足家中每一寸地板嗎?也許有機會可以,但他只要不小心被絆一下就GG了
當機器人只仰賴這些資訊,而不睜開眼睛利用參照物比對自身位置的時候,就很容易因為跨到障礙物讓機器偏移,或是輪子單側懸空等,很簡單就打亂了機器人的地圖與行走規劃,之後陷入無盡的混亂跟鬼打牆。影片就是一個最簡單的例子,剛開始還有模有樣,但碰到吧檯椅這個小挫折後就開始耍任性,根本就是草莓族!!
嗯,你確實不能說這種機器完全沒有規劃的能力,不過它的水準也就只有這樣而已,因為它能夠取得的環境資訊太少,所以很容易在盲人摸象的過程中迷失自己,或是顧好了自己身邊,但卻不知道還有個房間沒進去過,所以你看到廠商的影片中機器人走的那麼流暢,但買回家卻發現根本不是這回事,就是因為你沒能提供一個完美無障礙的空間給它
做好規劃的第二步:用腦袋
那是不是只要有睜開眼睛,規劃的表現就差不多?想也知道不可能,不信的話讓一個國中生跟一位數學教授比數學定理,你看誰算的又快又好
如何更精準的辨識障礙種類與邊界、過濾掉無效的雜訊、安排合理有效的路線與清掃順序、面對不同形狀障礙物的因應策略等,這些都是各家廠商的本事,像是同樣是採用雷射測距的品牌不少,從小二的實測文裡面就可以看到這幾台的不同之處。


而即便是沒有睜開眼睛的機器人,也不代表它就一定走的很差,當然在複雜的環境還是難以處理,但在沒那麼複雜的狀況下,還是有機會靠著優異的算法跟其他的資訊(例如導航盒)拿出不錯的表現,不過原則上還是會建議客倌們優先考慮眼睛有睜開的機器人。
如何快速判斷掃地機有沒有睜開眼睛?
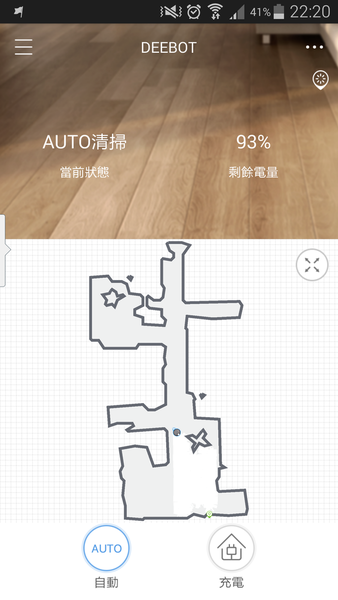
睜眼與閉眼最大的差別當然就是有沒有眼睛,所以當看到機器人有雷射測距頭、攝影鏡頭時,就大致可以放心了,但也不排除部份機器不使用這兩種工具就可以達成同樣的事情,但他們的共通點就是:
- 腦中有一張地圖
- 清楚自己目前所處的位置
這意味著機器可以做到:
當返回充電座充完電之後,還可以回到原本的地方繼續未完成的清掃工作
所以如果你不確定想買的那台是不是有睜開眼睛,除了看它有沒有鏡頭雷射頭之外,直接問廠商能不能回充續掃也是一種方式,如果不行你就要小心注意了,因為這很有可能是假裝自己很聰明但只是在盲人摸象的機器人(眨眼)
總結
再好的機器也需要人的配合,如果家裡亂的跟打完仗一樣,或是物理上就進不去,那沒有掃地機能幫上忙,但好的掃地機器人會盡量讓人不用特意配合,爛的掃地機器人就是即使你多方配合,它還是時不時耍任性給你看,以小二自己來說,在有限生命中我會選擇好的掃地機器人,生活要煩的事夠多了,不需要再多煩這一件啦