
掃地機器人開箱實測PART5 : LG VR65715LVM 變頻雙眼小精靈 (灰)
各位客倌好
小二最近工作量直線增加,原定的實測速度會被拖慢許多還請見諒,
第一次看的客倌可以先參考小二的這兩篇
– 如何測試掃地機器人
這次幫各位客倌實測的算是掃地機器人後起之秀之一的LG
本次小二測試的就是LG VR65715LVM 雙眼小精靈清潔機器人(變頻版) ,
話不多說,廬山真面目在此!
(正面上方那顆就是用來做定位的鏡頭)

這台機器是借測機,購買至今10個月,小二為了這次測試有購買新的邊刷、滾刷以減少誤差
充電座為底觸式,實際運行2週偶有回充不順,但多試幾次還是能成功回家,至少沒有掛在外面過
一、基礎部分:
邊刷為5公分的膠刷,雙側均有邊刷,
實際執行打掃上,對於牆邊與角落能夠順利貼合,將多數髒污掃出
主刷為18cm的滾刷,
相較於iRobot的完全不纏或是米家會把毛髮集中,
LG容易有較嚴重的毛髮纏繞,在清潔上需要特別注意,通常幾天就要清理一次了

集塵盒容量中上(600ml),結構設計上小二覺得相當不錯,加個把手相當好取出

整體來說內部還算好清理,濾網拆掉也可水洗

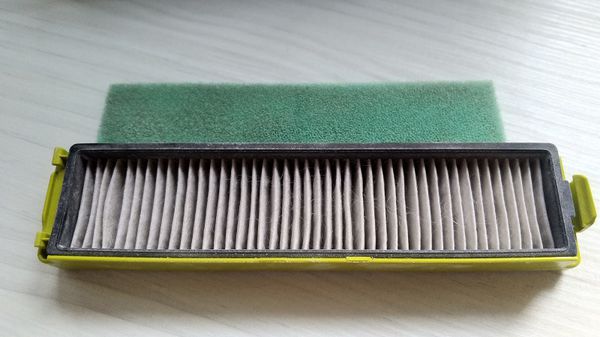
為了減少出風口的塵量,在出風的地方有緻密濾網(前方再另加個簡單初濾海綿)
翻過來可以看到,底部很前半的地方有三個防墜落偵測器,

後方部分則是抹布架(擦地效能小二會等之後的水箱版測試再一次討論,順便拿來與iRobot的Braava比較一下)
右下方則是”雙眼”的另一顆鏡頭

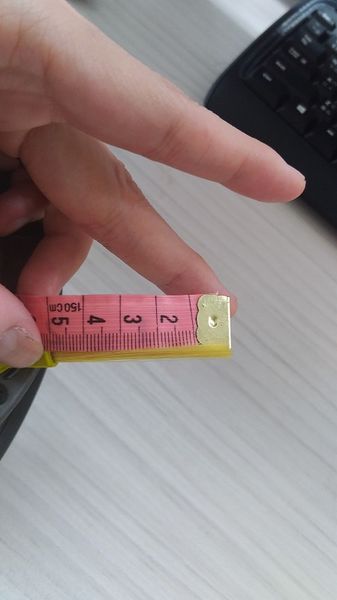
前方採用超音波偵測障礙,對於前方高於5公分的障礙可以提前辨識減速,

對於辨識到的障礙會很快減速(直接尺量是6cm,但實際大約是5cm以上就可以偵測到)

不過低於辨識區的障礙就會直接衝上去了,且因為不透過碰撞偵測,
小二猜測應該是透過IMU的變化(加速度、角度等)判斷撞到障礙物,並開始修正路徑
這應該就是很多人說會去爬電扇底座的原因(但上去其實不是問題,下的來就好XD)
LG使用鏡頭影像來當作定位工具,所以相對不用太高,只有9公分,同樣需保留足夠的空間以供通過
在購買前務必先確認沙發跟床板的高度是否能用,以小二家的狀況來說,算是很ok的高度
方形機身一般來說對於牆角的打掃力會好一些,不過因為旋轉半徑較大,脫困能力是較差的,
LG這台的旋轉半徑為38公分出頭,意即窄於40公分的環境就有可能進的去出不來(例如桌椅八卦陣)需要事先收好

二、規劃能力:
LG系列的掃地機器人均是採用鏡頭影像定位
官方標榜會記憶地圖並優化打掃路線減少碰撞,實際上多次打掃的確發現行走路徑有優化的樣子
邊準模式(zigzag mode)是邊前進邊確認範圍->範圍內之字型打掃->補掃漏掃區域->結束
三、清潔力:
掃地機器人並不是走過去就保證能夠掃乾淨,
特別是規劃型的機器人,原則上走過一次就不會回頭,所以一次清潔力格外重要,
不過實際測試的時候發現LG這台滿容易出現補掃的,
1.地面清潔能力:
針對不同地面,先以手持吸塵器打掃過後,分別投放麵粉(5g)、米粒(20g),
清掃結束後依據集塵盒內的重量變化估算清潔力,卡在刷毛、吸口上的都不算,所以實際清潔能力通常會比測試出來的數字再高一些
因為LG算是少數以靜音做為號召的機器,所以小二對標準與turbo模式均進行測試(好累…)
| 標準模式 | 超耐磨 | 花紋磚 | 毛地毯 |
| 麵粉5g | 3.8/5.0 | 3.5/5.0 | – |
| 米粒20g | 15.9/20.0 | 14.8/20.0 | – |
| turbo模式 | |||
| 麵粉5g | 4.4/5.0 | 4.3/5.0 | – |
| 米粒20g | 16.6/20.0 | 15.1/20.0 | 打掃失敗 |
(1)後方數字是投放的重量,前方數字是成功進入集塵盒的數字
(2)毛地毯屬艱難環境,故僅測試最容易打掃的米粒
一般模式:音量真的低,但掃除力也不出色
– 超耐磨地板+麵粉掃除 (3.8/5.0)
剛掃完的當下小二還驚豔於看起來滿乾淨的,但手一抹過發現其實多數麵粉是被均勻的抹平在地上orz

– 超耐磨地板+米粒掃除 (15.9/20.0)
行走路徑問題還不大,但是吸力偏弱,所以走過還是很容易殘留

– 磚面+麵粉掃除 (3.5/5.0)
滾刷是毛的,所以在這項測試上表現比起上次的roomba960略好一點,但也同樣有不少卡在磚縫裡

– 磚面+米粒掃除 (14.8/20.0)
同樣的狀況

Turbo模式
其實Turbo模式的音量已經不比別家機器安靜了,但如果是無人在家的時候使用則還是ok,
所以雖然LG標榜安靜清掃,小二還是將這個模式的清掃力一併測試列出,
– 超耐磨地板+麵粉掃除 (4.1/5.0)
– 超耐磨地板+米粒掃除 (17.9/20.0)
– 磚面+麵粉掃除 (4.3/5.0)
– 磚面+米粒掃除 (15.1/20.0)
-地毯+米粒掃除
在小二的地毯,LG測試三次都是一開始可以跑得動,但只要原地停留一下辨認路徑,邊刷就會糾纏而卡死報錯,所以本項測試不通過
四、障礙規避能力:
對於家中的常見障礙物,本次檢測測試4項:
1.吧檯椅/電扇底座通過測試
基本上LG會把吧檯椅當成一般的障礙物,碰觸後即轉向
2.複雜桌/椅腳通過模式
當成一般的障礙物,可以看到桌腳的右半邊就沒有進入打掃,比較by chance一點,但換個位置就會進入了
3.延長線處理(細繩子之類基本上大家都會中招,所以就不另外測了)
並沒有傳說中那麼容易踩線就掛掉
不過LG也的確是小二測試期間掛過最多次的機器沒錯(扣除玩具老鼠那種目前僅有iRobot成功帶著掃全家之外的)
這是剛好發生的一次,主要是進入之後因為旋轉半徑過大(方形)導致出不來,之前測試的幾台在這個位置都能順利脫困

至於另一個流傳很廣的爬電扇、體重計爬到掛掉這件事,
小二在測試過程中的確發現發生的頻率高於之前實測的這幾台,
目前判斷是高度介於3-5公分的物體有此危險
低於3公分的LG有較高機率可以成功脫困,高於5公分的,LG則能夠順利辨識為障礙物規避,剛好不高不低的就會硬上
像米家有碰撞感應,就比較不會硬上
下面影片範例是卡小二家體重計(3.5公分高),此外也爬上卡過PS4之類的,
電扇底座則因為小二家的電扇本身底座有斜角本來就很難爬上去所以沒事XD
五、全室覆蓋率與清掃速度:
1.覆蓋率:預估約為92%
– 路徑規劃上還有進步空間,頻繁出現回頭補掃的狀況,跑了兩周之後也還是無法避免
– 沿邊的”行走”沒有問題,雙邊刷加上沿牆的穩定,對於角落因為是方形機身,也能夠良好的貼合
2.清潔速度:10坪的清掃面積約50分鐘可打掃完成,整體來說速度不快,主要是多次補掃以及脫困的關係
六、其他項目:
1.運轉音量:在距離1公尺處測量音量為55dB(一般) / 65dB (Turbo),


一般模式相當安靜,Turbo模式就沒安靜到哪了
2.集塵盒/滾刷/邊刷清理
– 集塵盒:LG的集塵盒算相當好清理與拿出,濾網部分取下後也可以水洗,加分
– 滾刷:很容易毛髮纏繞,需要較頻繁的清潔
– 邊刷:不太需要清理
總評小結
LG VR65715LVM規格基本整理如下:
定位系統:鏡頭影像
機器高度:9cm
運作音量:55/65dB (1公尺處)
直接清潔力:一般模式較弱,turbo模式普通
邊角清潔力:普通,能夠將髒污掃出,但不見得能順利全部吸掉
障礙脫逃力:偏低,對於高度介於3-5公分的障礙、寬度較小的地方都有危險,邊刷也較容易纏繞卡住
全室覆蓋率:預估約為92%
清掃速率:10坪約50分鐘
價格:20900
關於之前許多客倌反映想請小二針對觀察的幾個項目如下:
Q1.是否真的如宣傳的那樣安靜?
A1.一般模式的確相當安靜只有55dB,如果不在同一個空間甚至可能感覺不到機器有在運行
Q2.如果真的安靜是否有兼顧到掃除乾淨?
A2.一般模式下的清潔力的確較弱,Turbo模式有加強,但也遜於其他品牌一線機種(且音量優勢就沒了)
Q3.是否真的很容易卡死待援?
A3.相對於其他品牌一線機,的確較容易卡,主要會發生在幾個地方:
– 高度介於3-5公分的障礙會硬爬,但可能下不來(3.5公分左右最危險)
– 寬度小於40公分的空間,可能會進入之後轉不出來(這點之前開過的VR200也有相同風險)
– 邊刷相較之下更容易纏繞一點
一次清潔力較弱,加上較容易纏毛髮的滾刷,跟上次開箱測試的iRobot roomba960剛好相反
這台並不適合頭髮多或是養寵物的家庭,
像是小二家中有養兩隻貓,已經每天需要早晚各出動一次掃地機器人,這台的清潔能力不太夠用
對於音量有極高要求的客倌可以考慮購買,但也須注意一般模式下的清掃力是偏弱的
也建議新購入的客倌在使用的前1-2週需要花時間觀察協助排除障礙,
關於掃擦合一,小二會在之後以專文方式說明
初步判斷擦地功能對於麵粉測試比較可能有幫助;對於米粒測試就比較還好
濕擦則會與iRobot的Braava系列機器(380t、JET 240)進行比較
———-
放在最後面的是各台掃地機器人一次清潔力的比較總表,之後有新的機器人測試完畢都會新增進來,
未來這張表就會是2017掃地機器人綜合評比的重要項目之一~
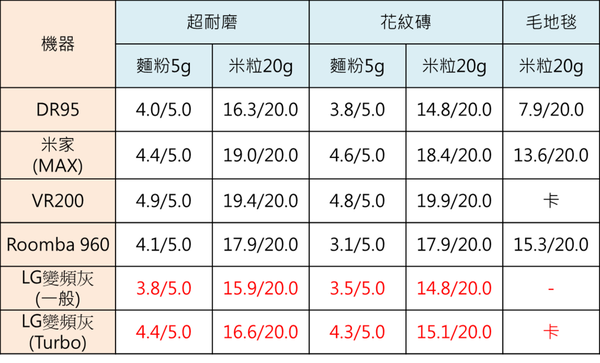
測試到目前,這幾台機器都展現出不同的特色面向,各位客倌在選購上可以參考小二目前的簡單評價:
DR95:手繪虛擬牆與遠端分區打掃,但打掃力跟音量就弱一點
米家:高破天際的CP值,但全速真的吵,建議遠端無人使用
VR200:極致的清潔力,但價格最驚人
roomba 960:超優越障脫困能力+完全不纏繞的滾刷,但對於細粉塵與不平整地面較弱
LG變頻灰:一般模式下顯著低的工作音量,但打掃力較弱一點,且卡機率相對高
以上就是這次的LG VR65715LVM (變頻灰)掃地機器人實測開箱,有任何疑問或是指教都歡迎在痞客邦或是FB留言/私訊唷
接著就又要跟各位客倌借用機器了><
家電好控,我們下週再見~![]()
感謝客倌分享
1.大約3公分出頭的是最危險的,因為看不到,但上的去卻下不來XD
2.椅腳陣對於方形機器的確比較困難一點,可能得考慮把椅子搬上桌唷
基本上這台的脫困能力的確不是很好,可能會需要把地面整理得更簡單一點
或甚至如您所說,人跟著保護XD
在我們家的缺點如下:
1.這台太低的東西因為前方沒有保險桿所以會直接撞上去⋯⋯而且進去椅子後很容易出不來,到最後掃完地我們家廚房的椅子是在中間的,感覺逃脫能力有待加強。
2.要是這台卡在地毯上逃脫不出來會啟動「暴力模式」,會瘋狂旋轉,這個時候所有感應器(除了防摔感應器)都會失靈。
3.他真的很喜歡爬高⋯⋯而且喜歡硬上⋯⋯這點有好有壞,我們家的地毯2公分都上得去,但是常常卡在電鋼琴的架子上下不來
4.一個月要重設一次,不然會忘記自己家在哪裡,常常一回到家就看到他在家裡游走,但是充電座就在前面。
感覺到最後他掃地時都要跟在他的屁股後面準備營救呢⋯⋯
感謝客倌支持 <3
讚+感恩
正等著這篇測試報告呢。
期待掃地機器人的技術成熟度再升級……..
再次感謝您的po文。
辛苦您了。