
掃地機器人開箱實測PART20 : iRobot Roomba i7+
iRobot算是全世界最知名的掃地機器人專業廠商之一,在2015發了980切入規劃式機種,直到2018年末才終於又推出了最新的機種Roomba i7+,話不多說,廬山真面目在此!

Roomba i7+本身可以區分為有包含左側完整自動集塵座的Roomba i7+,以及單純掃地機器人的Roomba i7兩種,而可想而知這個自動集塵座就是本次Roomba i7+最核心的賣點
基礎部分
首先可以看到掃地機器人本身的設計仍然遵循iRobot過去的風格,是使用機身中間朝斜前方看的鏡頭來做定位規劃(vSLAM)

與前代相同僅在右側有單邊刷,不過實際執行打掃上,在最後都會用右側走一次沿牆收尾,所以單側的影響並不大

但也因為維持圓形造型,可以看到對於牆角的貼合程度就會受限

拉遠一點可以看到全機的底盤部分,這邊與前代的差異就比較多了,但也有不變的地方,首先就是6顆的防墜落設計,可以讓Roomba i7+在遇到嚴重髒汙後退來回清掃時也不至於跌落,右上角的地板追蹤感應器是用以輔助機器的一般行走,值得一提的是Roomba i7+據說已能夠順利識別黑色地毯,不會當成懸崖規避

在紅外線鏡頭旁邊有相當少見到的碳刷,原廠表示這是用於防靜電干擾並延長機器的使用壽命,這點讓小二有些意外,在個人有限的接觸中,很少遇過這種狀況,暫時只能說是iRobot對於提高機器的耐用水準投入了相當多

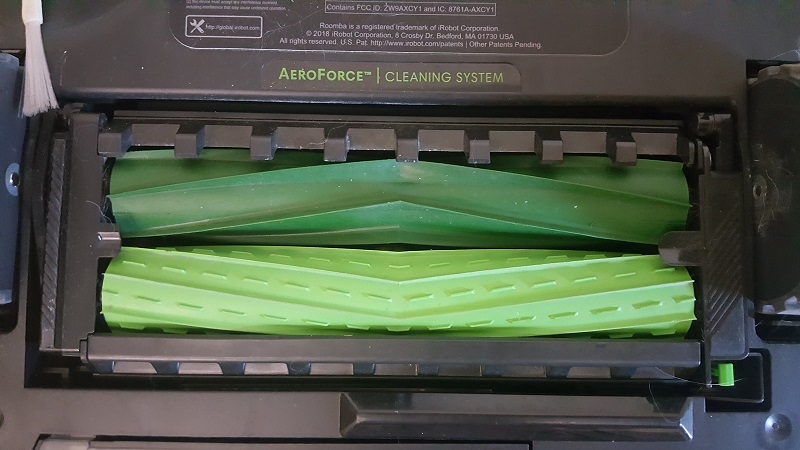
主滾刷的部分,iRobot使用的雙滾刷讓機器可以用夾的方式處理比較大體積的垃圾,所以幾乎什麼都吃得下,舊的8與9系列是使用兩根下面的滾刷,而在Roomba i7則將前方的滾刷更換成更寬的膠刷以提高對細粉塵等的清潔效果,也同樣沒有卡毛的問題,實測期間在家裡已經掃過無數的貓毛都不需要清理主刷,這點已經算是iRobot的招牌強項之一了,但新的滾刷也會讓機器不再吃一些更大體積的垃圾,例如整根逗貓棒等

另一個就是集塵盒的部分,首先先讓大家看一下Roomba i7+的自動集塵座,這個自動集塵座除了當掃地機器人的充電底座之外,還肩負著自動清理掃地機器人集塵盒的工作,當機器人回充之後就會透過底盤右下方的孔洞將集塵盒內的髒污吸入底座裡,而須要提醒的是這個基地座高度達48.5cm,會對於擺放上有一定的空間需求喔!

實際看回充的影片會最快,像這種底座兼垃圾收集站的設計,iRobot並不是第一個,像是Toshiba或是Ecovacs等都有過類似設計的產品,不過iRobot把整件事做的非常平順,且搭配的是可靠的掃地機,這讓使用的體驗很好
而打開底座可以看到,裡面是使用集塵袋的方式收集髒汙,這個集塵袋容量足以容納30次集塵盒裝滿的量,就算家中偏髒每天都會掃出滿滿一盒髒污,這個集塵袋也可以用上約1個月後才需要丟棄,如果家中不大或偏乾淨,2-3個月才更換一次是有機會的,
所以花少少的耗材費用,讓人可以懶得更徹底,就是這台的核心特點了

這意味著在大多數的時間,其實Roomba i7+並不需要人工清理集塵盒,也許每個月趁著更換集塵袋的時候順便清理一次塵盒跟邊刷就差不多了,如果沒裝集塵袋,則機器人回底座時就不會啟動自動清理行程,這點算是一個防呆設計,而塵盒的取出方式也有重新設計過,按壓後方的開關後就會彈出

集塵盒容量為400ml,為了減少出風口的塵量,也同樣在尾端部分有HEPA濾網,在拆下濾網後,整個塵盒可以直接水洗清潔

集塵盒的內裡長這樣,也順便讓大家看iRobot的滾刷真的很能吃,10元硬幣這種要吸起來都不在話下

過往iRobot隨機型機種給人會亂撞的印象,但其實機器本身對於周遭近距離內的障礙是能夠偵測到的,下面這張照片就可以看到其實都是有偵測手段的,而偵測到之後,iRobot會選擇慢速接近後試探看看能否通過,這就是之所以它能夠通過床裙而一般規劃式掃地機器人沒辦法的原因,這是屬於產品設計上的trade-off,不太能說是iRobot不聰明

簡單看一下iRobot在碰到牆壁的時候會有相當明顯的減速動作,但還是要碰一下就是了,這個”碰”就是即使Roomba i7+已經偵測到前方有牆壁、椅子或任何障礙,但仍會確認能否通過,這也就是窗簾床裙攔不住iRobot的原因
而這種設計,就造就了iRobot是目前唯一可以通過落地床裙遮擋的規劃式掃地機器人,即使床裙從不掀起,但床底下的環境也都能夠打掃到

規劃能力
Roomba i7+是採用鏡頭影像定位繪圖,機器正面有一個鏡頭,行走邏輯大致為:
- 直線出發開始之字形移動
- 找到邊界之後先補掃漏掉的地方
- 沿邊一次收尾
- 預設在小空間內會重複打掃一次,也可以進APP自行調整看是要強迫掃兩次還是強迫掃一次
而第二次之後的打掃就會先探個頭確認地圖狀況(Roomba i7+:嗯,這個地方我有掃過!),後面再回到標準的行走模式
清潔力:
掃地機器人並不是走過去就保證能夠掃乾淨,過往的iRobot因為是隨機式的,可以靠重複經過來提高打掃效果,但規劃型的機器人,原則上走過一次就不會回頭,所以一次清潔力格外重要,Roomba i7+具備髒汙偵測,當經過高度髒污地區就會後退來回清潔,但原則上遍歷過的地方就不再回頭還是基礎原則,所以這項測試可以拿來估計實際使用時,掃完地板的清潔度會有多高
1.地面清潔能力:
針對不同地面,先以手持吸塵器打掃過後,分別投放麵粉(5g)、米粒(20g),清掃結束後依據集塵盒內的重量變化估算清潔力,卡在刷毛、吸口上的都不算,所以實際清潔能力通常會比測試出來的數字再高一些
| 超耐磨 | 花紋磚 | 毛地毯 | |
| 麵粉5g | 3.5*/5.0 | 2.6*/5.0 | – |
| 米粒20g | 18.4/20.0 | 17.1/20.0 | 17.0/20.0 |
(1)後方數字是投放的重量,前方數字是成功進入集塵盒的數字
(2)毛地毯屬艱難環境,故僅測試最容易打掃的米粒
Roomba i7+在清理粉末髒污的時候,很容易發生卡在這代新的膠刷上面的狀況,不見得都能順利吸入塵盒(剛好這代是只改動一隻滾刷,所以看得更清楚),雖然同樣是把髒汙從地板上移除,但這點會影響到小二實測的結果(因為只計入吸進塵盒的部分),這主要是麵粉本身相對來說容易有點黏性,一般粉塵是不會這樣的,特別說明一下,而從上面自動回充影片也可以看到,在長期的使用下,其實滾刷上面是不會黏附住的,所以對於實測數字的部份,麵粉測試這台算是略吃點虧,這點先說明一下

– 超耐磨地板+麵粉掃除(3.5/5.0)
比起前代有進步,新的膠條在平整地面對於粉末還不錯,不過膠條也比較會卡粉末,所以不見得都能順利進去集塵盒,數字上才沒那麼好看,也可以看到汙染偵測功能會讓Roomba i7+前後來回通過同一個位置
掃完的地板抹一下就看的出來,硬地對粉末的清理真的有進步,這邊應是新版滾刷的功勞

– 超耐磨地板+米粒掃除(18.4/20.0)
即使設定為只通過一次,但似乎只要只要偵測到足夠多髒汙(可以看到有連續的來回清潔),就會再多掃一遍,這與預設的走兩遍並不相同,在前面的影片可以看到,標準的走兩遍是縱向與橫向各一次
– 磚面+麵粉掃除(2.6/5.0)

– 磚面+米粒掃除(17.1/20.0)
-地毯+米粒掃除 (17.0/20.0)
Roomba i7+在地毯的清掃,最終成績比起想像中的還更好
障礙規避能力:
對於家中的常見障礙物,本次檢測測試3項:
1.吧檯椅/電扇底座通過測試
基本上Roomba i7+會把吧檯椅當成一般的障礙物,碰觸後即轉向,但在通過斜面的時候可以看到比起之前的960/980有更掙扎一點
2.複雜桌/椅腳通過模式
與前代同樣會先將桌腳當成一般的障礙物去規避,但後面的補掃階段還是順利透過環繞一次達到完整清掃
3.延長線處理(細繩子之類基本上大家都會中招,所以就不另外測了)
算是通過的滿輕鬆的
全室覆蓋率與清掃速度:
1.覆蓋率:預估約為90%
- 路徑規劃上還有進步空間,偶爾還是會出現回頭補掃的狀況
- 床底下床裙不用掀起來就可以直接衝進去,但在無光的床底辨識會受影響(用鏡頭影像辨識的都會很困難)
2.清潔速度:全室18坪,實際清掃面積約11坪,Roomba i7+使用50分鐘可打掃完成,整體來說速度算是中段班,但跑夠多次之後,有時可以把打掃時間壓在45分鐘內(具體在你家要花多少時間則仍依個人環境不同而可能不同),下面的照片則請注意兩張左下方的部分,這是小二主臥的空間,可以看到在有床裙遮蔽的情況下,Roomba i7+還是可以順利的進去打掃,但因為內裡是屬於極微光的環境,所以仍然會對機器人的行走造成影響,導致有時仍會辨識不清而誤判,這種極微光甚至無光的環境,對於仰賴鏡頭辨識的任何機種來說都是非常困難,所以這點可以理解
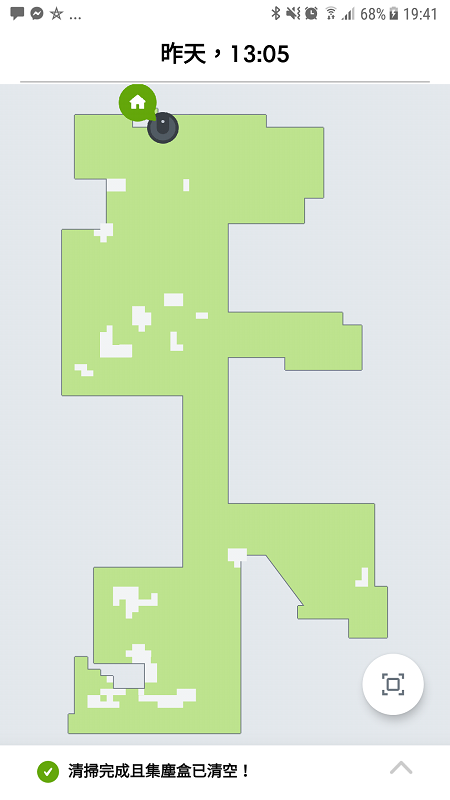
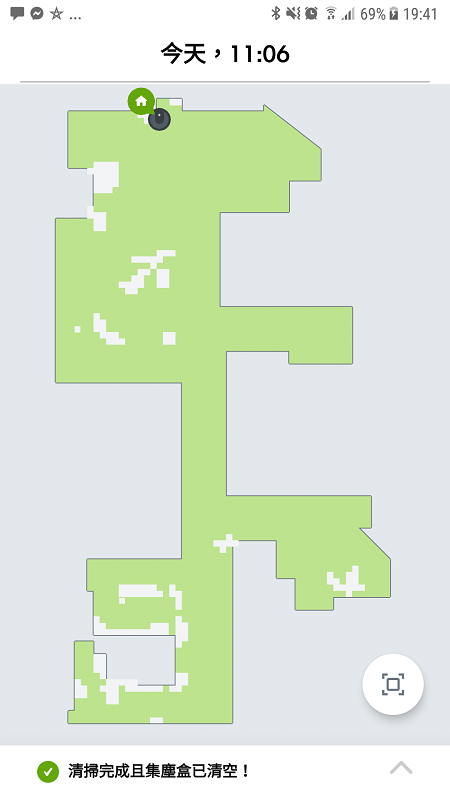
不過在N多次打掃之後,透過多次對照仍然可以正確辨識出床底下的空間為全部均可通過並無邊界,
其他項目:
1.運轉音量:在距離1公尺處測量音量為67dB,其實不算太吵(當然也不是安靜)
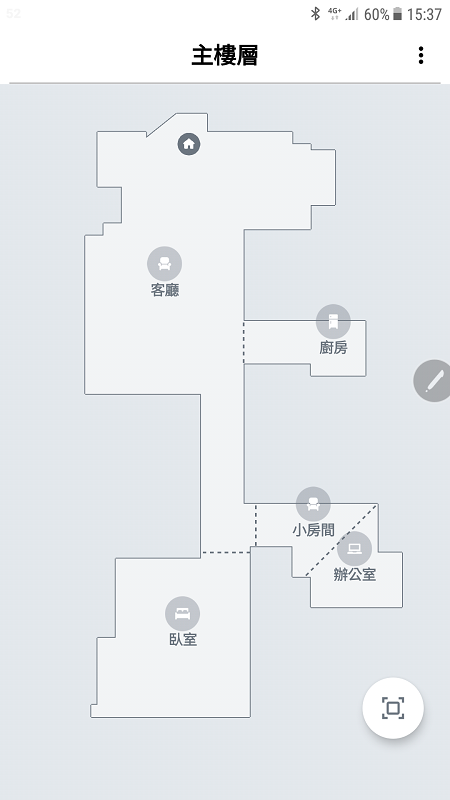
2.APP
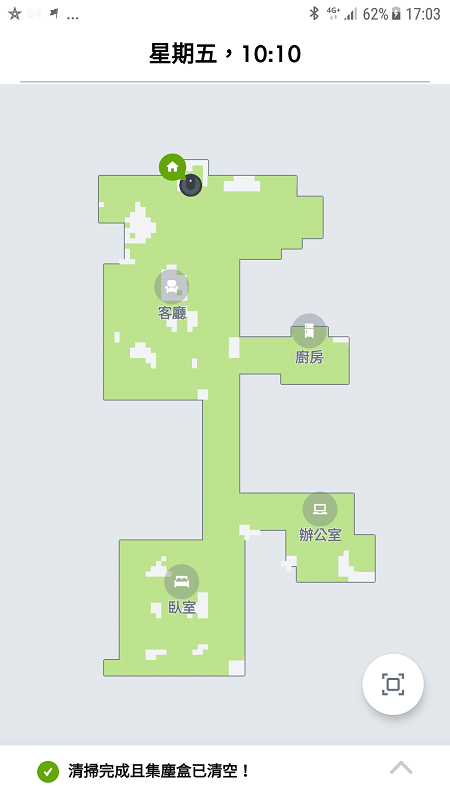
iRobot對於Roomba i7+的APP設計算是有滿大幅度的進步,整體操作極為易懂,首先第一步就是先讓機器人多跑個幾次,通常3-5次左右就可以得出一張完整的地圖,接著就可以手動分隔這些房間,但須要注意的是只能用線去拉,沒辦法像常見的直接拉出一個區塊做獨立操作
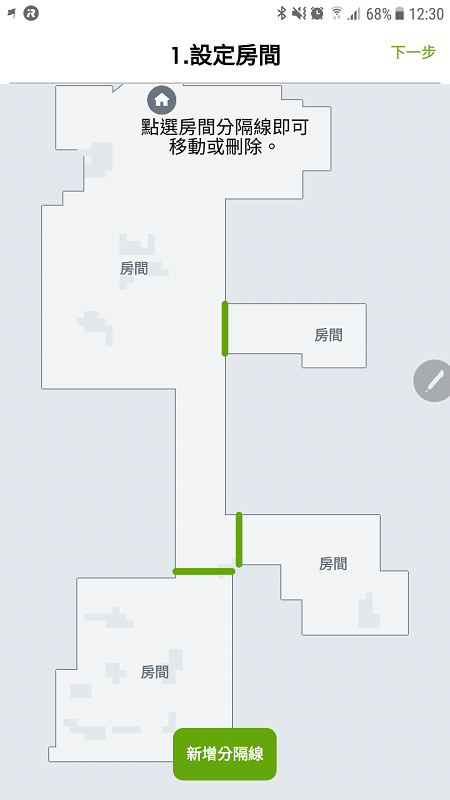
如果想要的話,可以甚至使用斜線去對空間做另外的分割以個別處理,這點是不錯的
而之後每次啟動清掃就可以選擇是要掃全家還是只針對部分房間進行清潔

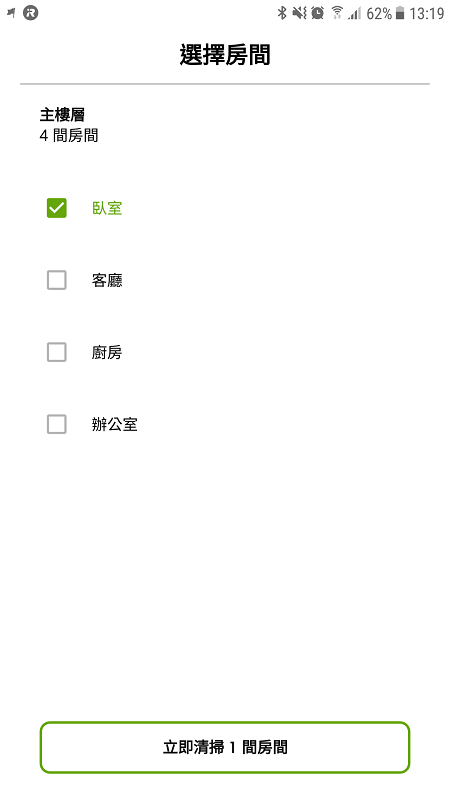
至於排程也可以針對不同空間個別規劃,所以可以做出一些有趣的設定,例如每天早上10點清掃全家,下午5點針對貓常亂跑導致很多毛的客廳再做一次獨立的清掃(並強制連續清掃兩次),像這樣就可以有更多的彈性可以運用,是很棒的設定

連續一個月使用不清理實測
iRobot Roomba i7+最主打的特色就是自動集塵底座,號稱讓人可以1個月都不用照顧,這點相較於現行一般掃地機器人每週需要維護1-2次(集塵盒、滾刷邊刷),無疑是一項巨大的進步,畢竟掃地機器人就是為了減少人的家務勞動嘛!而既然廠商是這樣設計、這樣宣傳產品的,小二就會來檢驗這方面的表現,實際真的一整個月都不管後,小二得到以下的結論:
滾刷、邊刷部分
- 滾刷的不纏毛髮表現依舊良好
- 邊刷會纏毛,但對於機器運轉並無明顯影響,每個月處理是可以的

- 輪子會纏毛,且可能對於機器的運行產生影響(最近15天發生1次沒卡到東西但報錯,雖然是標示左輪卡到,但實際檢查並無卡東西,判斷是前輪的卡),建議兩週處理一次

這是卡錯的截圖


集塵部分
- 以小二家的髒汙量,大約1-1.5個月需要更換一次集塵袋(每天掃1-2次)
- 集塵袋的內容大約有這樣,容納的非常滿

總評小結
iRobot Roomba i7+規格基本整理如下:
- 定位系統:vSLAM(鏡頭影像)
- 機器高度:9cm
- 底座高度:48.5cm
- 運作音量:67dB (1公尺處)
- 直接清潔力:一般地面良好;磚面普通;地毯優秀(連長毛都掃的動)
- 邊角清潔力:貼近程度不夠,邊角打掃力較弱
- 障礙脫逃力:非常好,除非拿一堆逗貓棒整它,不然幾乎沒有卡機過,而且幾乎什麼都吃得下
- 全室覆蓋率:預估約為90%
- 清掃速率:11坪約50分鐘,跑了夠多次之後有時可以接近45分鐘就掃完(具體在你家要花多少時間則仍依個人環境不同而可能不同)
- 價格:39,880
- 集塵袋價格:250元/個,個人判斷只要不是特別髒或是特別大導致i7+每次都滿載而歸的話,就算天天掃也差不多2個月再換一次就好
頂規機種的價格,但必須說單以清潔能力來說,相較於980主要就是硬地的粉塵處理稍有進步,以及地毯上的表現,這主要是受限於機器的圓形設計且沿邊不夠貼近,導致對於邊角的打掃效果難以提升,而原本正常會掃到的地方就已經表現不錯了之故,所以選i7+或980的最大考慮點可能是在自動集塵座上,不得不說這是一個非常省心的功能,也大幅減少人工維護的負擔,合理來說每個月稍微看一下底盤狀況就好(當然地上常掉小東西的可能還是要多注意一下),另外就是時間到整個集塵袋丟掉換新即可,過程不髒手這點對於過敏患者來說也相對友善,此外APP的部份也足夠易用,如果預算充裕之下選購這台是沒啥問題的,使用爽度會很高
至於適合對象則同樣是很一貫的iRobot:
- 地毯較多,磚面等有凹槽的不平整地面較少
- 較多窗簾、床裙且懶得事前排除,希望機器人可以直接進入打掃
- 地上常有點雜物小東西,一般掃地機器人容易吃壞肚子卡死的環境
- 有寵物跟長髮公主這類大量毛髮產生的環境
0509更新
有點多人詢問i7+相較於上一代的980具體差異到底在哪邊、有哪些,所以小二簡單整理一下最關鍵的幾項差異:
滾刷差異
980使用的是雙短膠刷,i7+則將其中一隻變成長膠刷,這會提高機器對於細粉塵與極小髒汙的清潔效果,但要注意的是,硬幣這種大小算是i7+能吃的最大極限,如果順利吃進去,只要有一定體積重量的就不用擔心會被自動集塵底座吸走丟掉,但要提醒的是硬幣不見得總是能夠順利進入塵盒,而是有機率卡在滾刷的位置(如果卡了,在運轉時會聽到有一點異音),這種情況發生就需要記得立刻處理喔!
行走邏輯差異
在很小的空間下,有時會有980比起i7+的行走更有邏輯的錯覺,但放到整體居家環中,以小二家來說,讓i7+有足夠多次的清潔後,有機會將打掃時間控制在45分鐘左右,這點就會比980更有效率一些
APP的使用差異
i7+能夠記憶地圖並做分區清潔設定,這點算是相對於980的顯著進步
自動集塵底座
這算是最直觀也是最大的差異,i7+的自動集塵確實可以讓你連續一個月以上不用照顧機器,相較於一般機種需要每周處理個1-2次算是相當巨幅的進步
i7+的app可設定禁止區域嗎?
可以設禁入
請問小二,副廠跟原廠耗材如集塵袋和刷條,價格差距好幾倍,兩者有很大的差距嗎?不知道副廠刷條究竟能不能用?
可以用,但我的經驗是壽命都滿短的,以我自己用的s9+來說,原廠滾刷起碼可以撐1年,副廠的大概半年就顯著磨損甚至斷裂了
塵袋就比較沒差
請問i7和i3+會推薦哪台呢?感謝
i7,i3面對複雜格局一定表現會比較弱
除非你是大套房之類的剪單格局
小二您好
目前家中使用的是iRobot 760,已經不堪使用,近期有想換i7+,有一些顧慮導致遲遲無法下手。
1、家裡地上常有長髮,因此i7+的膠刷很適合
但家中全部是舊式磁磚(縫隙較大較深的那種),很擔心清潔表現會輸給有毛刷的760
不希望花了大錢買來卻掃不乾淨…(主要是灰塵跟毛髮,沒有寵物跟雜物)
不曉得是不是我擔心太多了?還是真的該考慮膠毛混合刷?
2、原本也有考慮伊萊克斯 pure i9.2,但上網發現有不少網友提到故障率很高的問題
也看到至少三位以上的網友短短幾個月已經送修三次,因此卻步。
請問小二有什麼建議嗎?
謝謝!
請問小二,i7+ 跟 s9+ 這類自動集塵的機型,集塵盒濾網能多久清一次呢?
舊的掃地機是每週清潔集塵盒時順便清濾網,避免吸力減弱。
自動集塵底座抽取時應該會順便帶走部分的濾網灰塵,
但不知道是否足夠維持三個月,甚至半年都不影響吸力?
以我使用S9的經驗,預估每年直接換一次濾網差不多
小二, 您好, 近期頸椎出了點問題想購買掃地機, 經由您實測的文章分享後, 想請教iRobot i7 / i7+ / 960三種機行哪種會比較符合我的需求呢 ( 屋內坪數46坪, 有潔癖, 兩貓, 兩人, 4房, 木地板+磁磚 都沒有非常平面,後續維修服務) , 預算至多2.5萬, 還是其它品牌什麼型號可以供我參考嗎 ~ 花了好多時間爬文, 但真的對於家電選擇非常有障礙, 先謝謝你願意花時間解答
iRobot的話,960可能已經夠了,但你坪數大到可能一次掃不完,保險起見就是選980,i7如果不買+沒意義,但i7+你就爆預算了
謝謝小二抽空回覆,今日已至百貨櫃位先看實體,綜合考量應該會傾向i7 (收納盒可水洗也是其一因素),但不懂您說 “i7如果不買+沒意義” 這句話的意思,能多花點時間說明嗎? 謝謝
您好。請問i7+電力耗盡還沒掃乾淨的話,會自動回去充電後在自己出來掃嗎?
會喔
小二你好, 想問i7的app是否可以像s9一樣可以規劃設定禁區呢?
可以喔
小二好….想請問一下960能不能適用自動集塵底座呢??
不行喔,只有i7跟s9可以
小二你好, Neato D7 有沒有機會拿來跟 i7+比較一下
謝謝
如果有借到的話XD 但個人覺得neato自從賣給vorwerk之後就沒甚麼進步了
謝謝小二回覆我這小小觀眾,但D型機子我的想法是對於死角清潔能力比較好,放眼市場,除了Irobot下一代會有D型機,好像就找不到了
不知道小二大大有沒有機會弄一台S9的回來測試看看XD
看新一代的D型是否有更大大的加分XD(多年過去終於願意打臉自己一次改成D型了……)….
我也很想阿,但真的價格過高QQ
請問這台i7跟伊萊新一代i9.2 您比較推薦哪一台呢?
我自家要用的話會用i7啦,但伊萊克斯的掃地機還是很不錯的,取向不同看你重視的面向而定